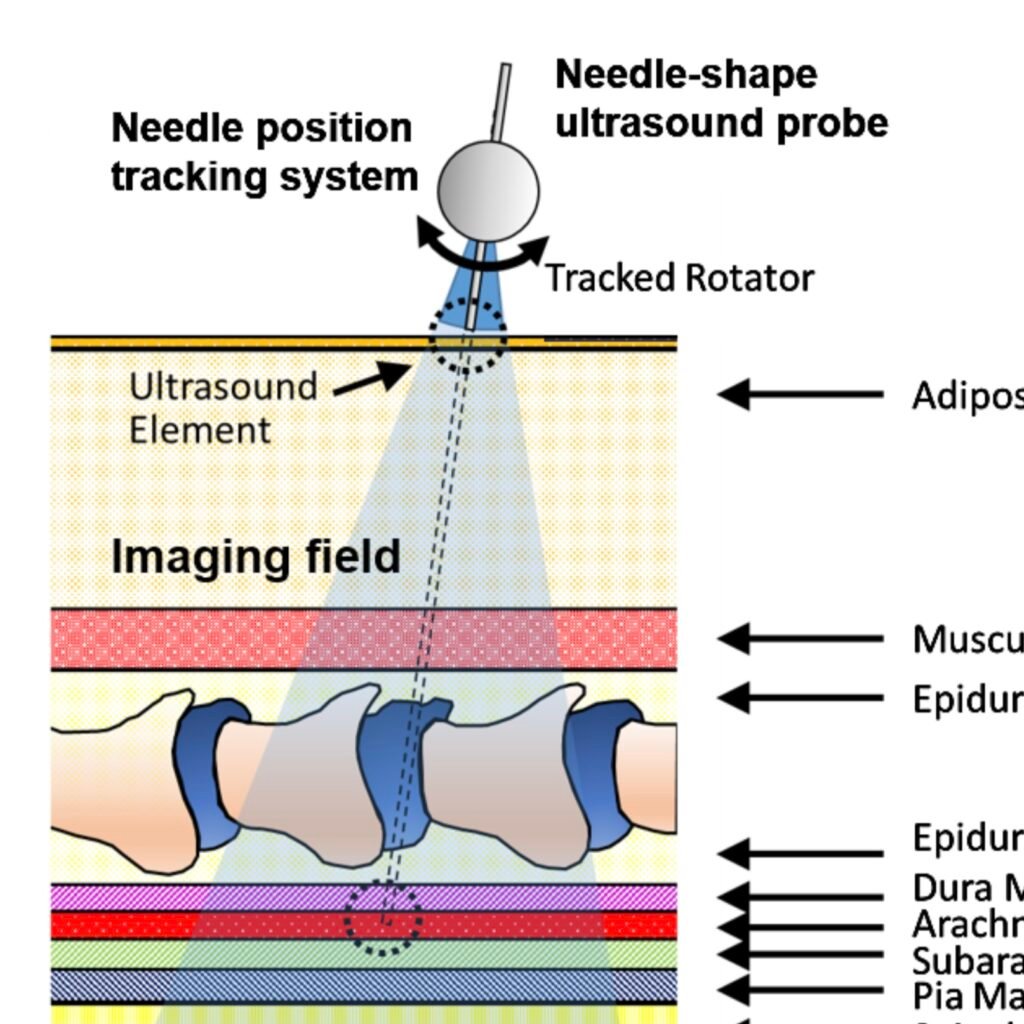
Lumbar punctures (LPs) are interventional procedures that are used to collect cerebrospinal fluid. Since the target window is small, physicians have limited success conducting the procedure. The procedure is especially difficult for obese patients due to the increased distance between bone and skin surface. We propose a simple and direct needle insertion platform, enabling image formation by sweeping a needle with a single ultrasound element at the tip. The needle-shaped ultrasound transducer can not only sense the distance between the tip and a potential obstacle, such as bone, but also visually locate the structures by combining transducer location tracking and synthetic aperture focusing. The concept of the system was validated through a simulation that revealed robust image reconstruction under expected errors in tip localization. The initial prototype was built into a 14 G needle and was mounted on a holster equipped with a rotation shaft allowing one degree-of-freedom rotational sweeping and a rotation tracking encoder. We experimentally evaluated the system using a metal-wire phantom mimicking high reflection bone structures and human spinal bone phantom. Images of the phantoms were reconstructed, and the synthetic aperture reconstruction improved the image quality. These results demonstrate the potential of the system to be used as a real-time guidance tool for improving LPs.
Medical UltraSound Imaging and Intervention Collaboration