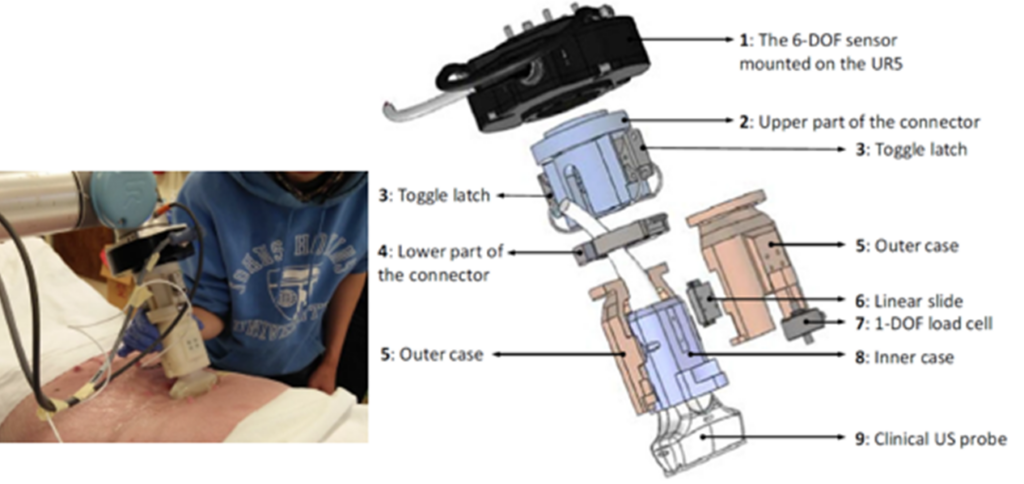
Our proposed system addresses significant limitations in present-day robotic ultrasound research systems by enabling direct control of ultrasound imaging forces during co-manipulation. The proposed combined control based on hand-to-probe and probe-to-tissue force sensing enables development of a system that is intuitive to control and permits accurate control of forces to the patient with minimum physical stress for the sonographer. The proposed system consists of two key components: a robotic arm that holds and actuates the ultrasound probe, and a dual force sensor setup that enables cooperative control and adaptive force assistance (Figure 1). With the admittance force control, the robotic arm complies with the motion of the operator, while assisting with force during the scanning. This co-robotic ultrasound concept possesses the potential to make ultrasound a less user-dependent modality by incorporating virtual fixture or other advanced control strategies.
Publications
- Fang TY, Zhang HK, Finocchi R, Taylor RH, Boctor EM. Force-assisted ultrasound imaging system through dual force sensing and admittance robot control. Int J CARS. 2017; 12(6): 983-991.