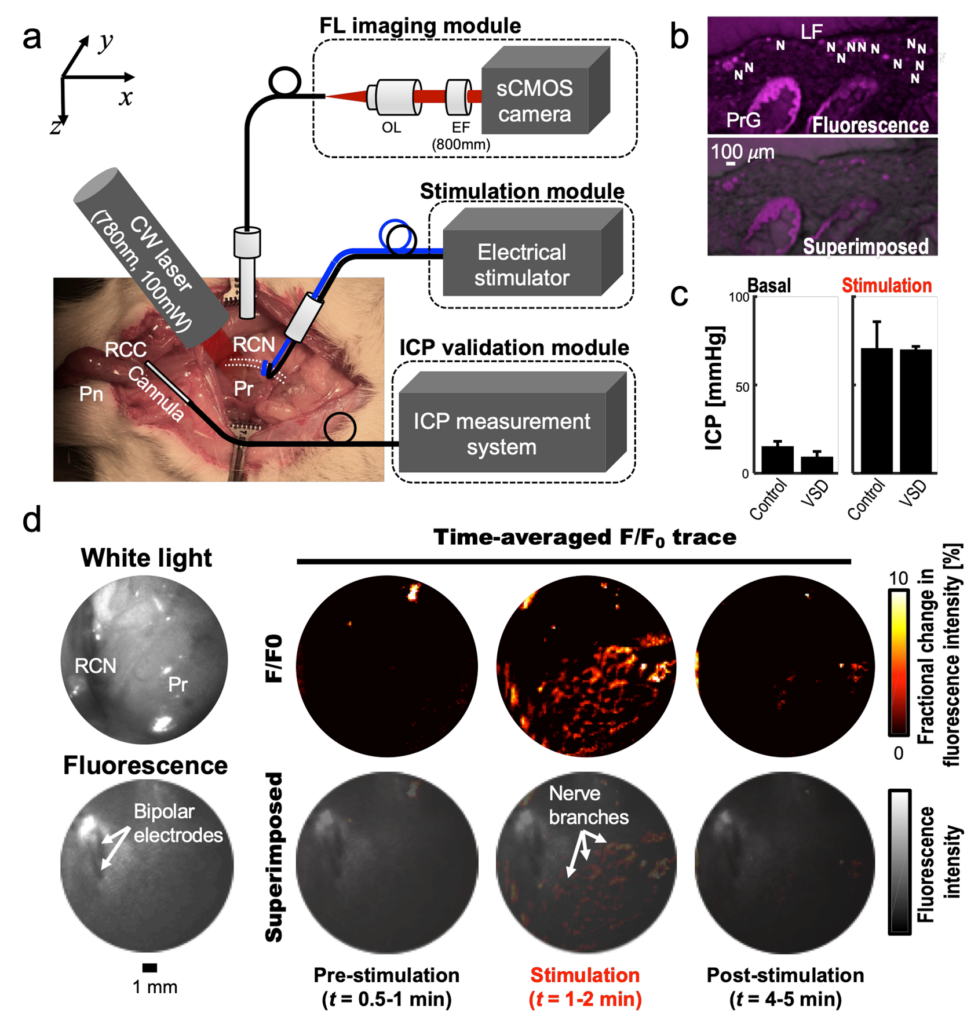
Sparing nerve during surgical procedure such as radical prostatectomy is crucial in minimizing post-operative complication. In this project, we aim to provide intra-operative functional nerve localization. Voltage-sensitive-dye imaging was developed by using fluorescence (FL) and photoacoustic (PA) imaging, where the optical contrast upon membrane potential variation was identified. In particular, PA imaging showed depth-profiling of…
Tag: co-robotic ultrasound
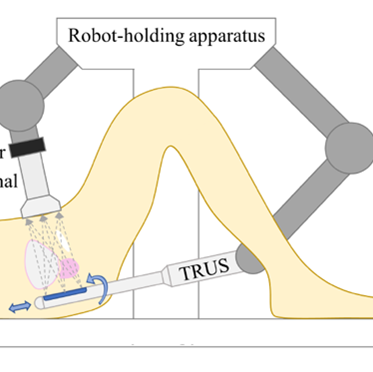
Ultrasound computed tomography (USCT) offers quantitative anatomical tissue characterization for cancer detection. While most research and commercial development has focused on submerging target anatomy in a transducer-lined cylindrical water tank, this is not practical for imaging deep anatomy, so an alternative approach using aligned abdominal and endoluminal ultrasound probes is required. We propose a new…
Synthetic aperture is a signal processing technique used to increase image resolution by synthesizing information from multiple subapertures, but the resolution improvement is limited by the physical size of the array transducer. Our co-robotic approach extends the effective aperture size by providing accurate tracking information and force-control compensation in a rapid execution.This concept can be…
Our proposed system addresses significant limitations in present-day robotic ultrasound research systems by enabling direct control of ultrasound imaging forces during co-manipulation. The proposed combined control based on hand-to-probe and probe-to-tissue force sensing enables development of a system that is intuitive to control and permits accurate control of forces to the patient with minimum physical…
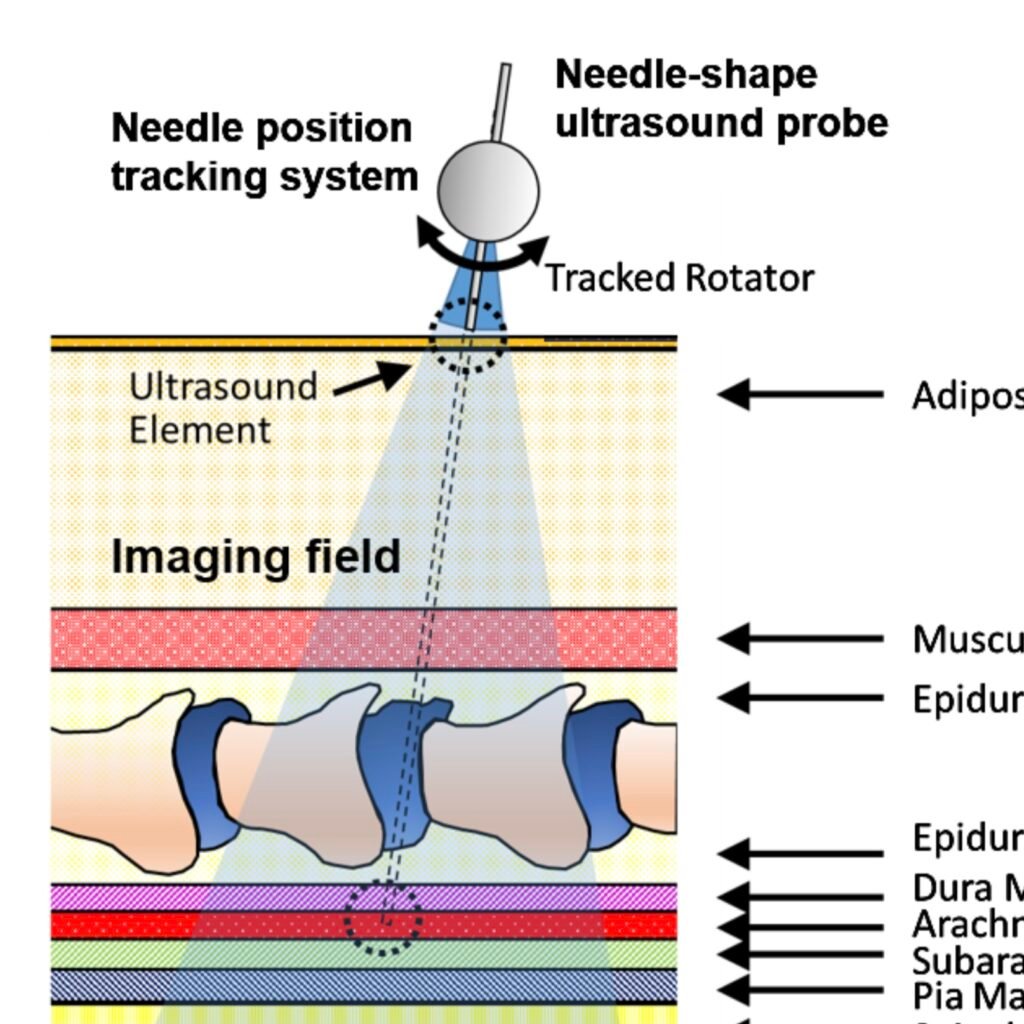
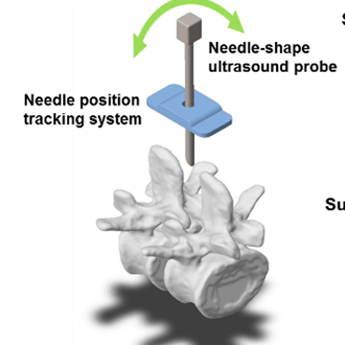
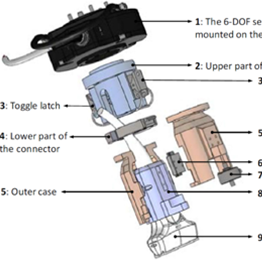
Lumbar punctures (LPs) are interventional procedures that are used to collect cerebrospinal fluid. Since the target window is small, physicians have limited success conducting the procedure. The procedure is especially difficult for obese patients due to the increased distance between bone and skin surface. We propose a simple and direct needle insertion platform, enabling image formation by sweeping a needle with a single ultrasound element at the tip. The needle-shaped ultrasound transducer can not only sense the distance between the tip and a potential obstacle, such as bone, but also visually locate the structures by combining transducer location tracking and synthetic aperture focusing. The concept of the system was validated through a simulation that revealed robust image reconstruction under expected errors in tip localization. The initial prototype was built into a 14 G needle and was mounted on a holster equipped with a rotation shaft allowing one degree-of-freedom rotational sweeping and a rotation tracking encoder. We experimentally evaluated the system using a metal-wire phantom mimicking high reflection bone structures and human spinal bone phantom. Images of the phantoms were reconstructed, and the synthetic aperture reconstruction improved the image quality. These results demonstrate the potential of the system to be used as a real-time guidance tool for improving LPs.