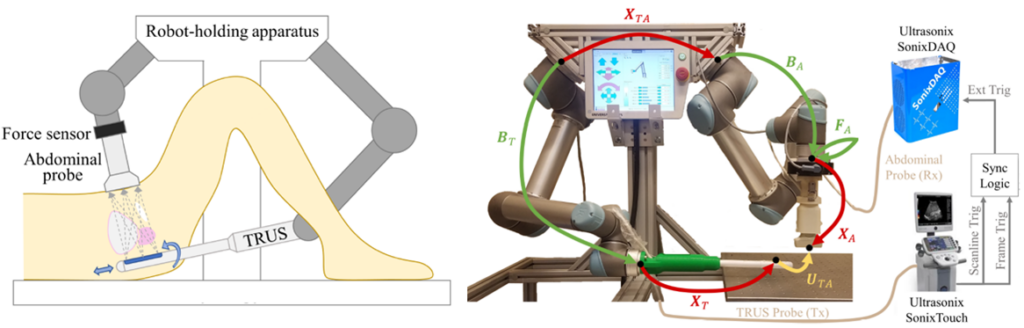
Ultrasound computed tomography (USCT) offers quantitative anatomical tissue characterization for cancer detection. While most research and commercial development has focused on submerging target anatomy in a transducer-lined cylindrical water tank, this is not practical for imaging deep anatomy, so an alternative approach using aligned abdominal and endoluminal ultrasound probes is required. We propose a new paradigm of quantitative prostate cancer diagnosis and screening that uses limited angle US tomography, enabled by a dual co-robotic ultrasound system (Figure 1). In this dual-robotic system, one arm wields a linear abdominal probe, the other wields a linear transrectal ultrasound (TRUS) probe.
We currently have an active IRB protocol with the Clinical Center at NIH to validate this imaging approach. We used freshly resected prostate inserted within a patient-specific and US-friendly mold. The technique and test bed model were designed to enable direct correlation with MRI and pathology (matching slices of correlative histology whole mounts). This was performed in two steps: first, a patient specific mold with grooves to guide histology knife was 3D printed. Second, the same mold was created using an US friendly material (acrylamide gel with tissue mimicking property) with marks indicating the corresponding slices to be scanned using the US probes. The resulting quantitative SoS imaging of the prostate was very promising, showing correlation between the proposed USTS and MRI slice. With volumetric data acquired so far from more than 20 samples, we are investigating a deep learning approach to optimize limited-angle reconstruction.
Publications
- Aalamifar F, Cheng A, Kim Y, Hu X, Zhang HK, Guo X, Boctor EM. Robot-assisted automatic ultrasound calibration. Int J Comput Assist Radiol Surg. 2016;11(10):1821-9.
- Aalamifar F, Khurana R, Cheng A, Guo X, Iordachita I, Boctor EM. Enabling technologies for robot assisted ultrasound tomography. Int. J Med Robot. 2017;13(1): e1746.
- Anas EMA, Cheng A, Seifabadi R, Wu Y, Aalamifar F, Wood BJ, Rahmim A, Boctor EM. CNN and back-projection: limited angle ultrasound tomography for speed of sound estimation. Proc. SPIE 10955, Medical Imaging 2019: Ultrasonic Imaging and Tomography, 109550M (10 April 2019).
- Seifabadi R, Cheng A, Malik B, Kishimoto S, Wiskin J, Munasinghe J, Negussie AH, Bakhutashvili I, Krishna MC, Choyke P, Pinto P, Rahmim A, Boctor EM, Merino M, Lenox M, Turkbey B, Wood BJ. Correlation of ultrasound tomography to MRI and pathology for the detection of prostate cancer. Proc. SPIE 10955, Medical Imaging 2019: Ultrasonic Imaging and Tomography, 109550C (15 March 2019).